

こんにちは、RPAコンサルタントのプロコアラです。
今回はUiPathアカデミーのレベル2 Orchestratorの小テストを解説します。
レベル2 Orchestrator

レベル2のテストでは20問の問題が出題され、70%以上正解した場合に合格です。
テスト合格後は再度テストを受けることができないため、正解して答えが分かっている問題のみ載せています。
よって、全問題を網羅できていません。
問題:Robot Keysはどのようにして生成されますか?
・Robot Keysはそれぞれのロボットで自動的に生成され、Robot Trayで確認できます。
・Robot Keysはライセンスに付随します。
・ロボットがプロビジョニングする過程で、Orchestratorが一意のRobot Keysを生成します 。
・Robot KeysはUiPath Studio経由で生成されます。
正解
・ロボットがプロビジョニングする過程で、Orchestratorが一意のRobot Keysを生成します 。
Robot KeysはOrchestratorでProvision(プロビジョニング:準備)する際に、一意の値が生成されます。
Robot Keysはロボットの設定で使用し、OrchestratorとRobotを関連づけます。
問題:Add Log Fieldsアクティビティはどのような時に使用するべきでしょうか?
正しいものを一つ選択してください
・ログメッセージに新規フィールドを追加するために、通常のログメッセージを変更しなければならないとき。
・ログを有効にする必要があるとき。
・5つの可視フィールドの最大値を持つログメッセージを生成する必要がある場合。
正解
・ログメッセージに新規フィールドを追加するために、通常のログメッセージを変更しなければならないとき。
Add Log Messagesアクティビティを使用することで、OrchestratorのLogsから追加したフィールドを確認できるようになります。
問題:ロボットが、「Info」レベルを指定された状態で「Log Message」アクティビティを使用するワークフローを実行しています。このロボットのログレベルが「Error」に設定されている場合、このInfoログはOrchestratorのLogページに表示されるでしょうか?
正しいものを一つ選択してください
・はい、すべてのログメッセージはレベルに関係なく、OrchestratorのLogページに表示されます。
・いいえ、「Error」および「Critical」型のログメッセージのみがOrchestratorのLogページに表示されます。
正解
・いいえ、「Error」および「Critical」型のログメッセージのみがOrchestratorのLogページに表示されます。
Robotは出力ログレベルを設定でき、設定したログレベルより下のログは出しません。
以下はUiPathのログレベルを上位から並べたものです。
・Critical
・Error
・Warning
・Information
・Trace
Informationにログレベルを設定した場合、Traceレベルのログは出力されません。
問題:プロセス1は「A」というEnvironmentで実行されています。ロボットXは「B」というEnvironmentにのみ追加されました。さて、プロセス1はロボットXにアサインすることができるででょうか?
正しいものを一つ選択してください
・はい
・いいえ
正解
・はい
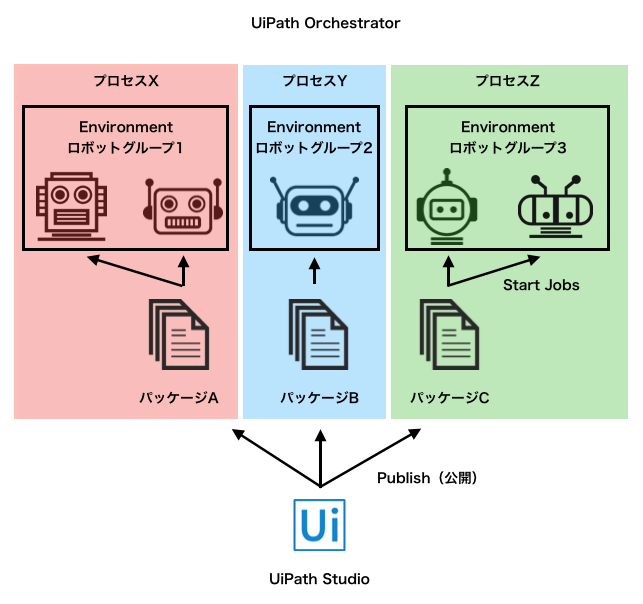
Orchestratorのプロセスは、Environment(ロボットグループ)とパッケージを関連づけた単位です。
プロセスは関連づけたEnvironmentの中にあるロボットしか選択できないので、答えは”No”ではないかと考えているのですが、答えが”Yes”となる理由がわかる人いれば教えてください。
問題:実行中のプロセスを停止する際に使用するものは次のうちどれでしょうか?
正しいものを一つ選択してください
・Cancel
・Terminate
・Finish
・End
正解
・Cancel
・Terminate
CancelとTerminateの違い
Cancel:Should Stopアクティビティが無い場合、停止しない
Terminate:強制停止
問題:Orchestratorはどのような目的で使用されますか?
正しいものを一つ選択してください
・ローカルマシンでウィンドウの処理を行う。
・任意の数のロボットを遠隔制御してワークフローの管理を行う。
・スーパーバイザーモードでロボットが実行できるようなワークフローを設計する。
・スーパーバイザーではないモードでロボットが実行できるようなワークフローを設計する。
正解
・任意の数のロボットを遠隔制御してワークフローの管理を行う。
Orchestrator の主な機能
- プロビジョニング – ロボットとウェブアプリケーション間の接続を確立し、維持します。
- デプロイメント – パッケージバージョンを該当のロボットに正確に割り当て、確実に実行します。
- 構成 – ロボットグループおよびプロセスの構成を保持し、提供します。
- キュー – キューとキューアイテムの管理を確立します。
- 監視 – ロボットの識別データを追跡し、ユーザーのアクセス権限を保持します。
- ロギング – ログを SQL データベースや Elasticsearch (ユーザーのアーキテクチャおよび構成に応じて異なります) に格納し、ログのインデックスを作成します。
- 相互接続性 – サードパーティソリューションまたはアプリケーションの通信において一元管理ポイントとして機能します。
問題:Transactionのステータスが24時間以内に更新されない場合何が起こるでしょうか?
正しいものを一つ選択してください
・ロボットが処理をするまで、トランザクションがQueuesセクションに残ったままになる。
・ステータスがAbandonedに変更されます。
・Queuesセクションから自動的に削除されます。
・優先度が1段階上昇します。
正解
・ステータスがAbandonedに変更されます。
Abandanedは「放棄された」という意味です
問題:ロボットとOrchestrator間の接続を確立するために必要なステップは以下のうちどれでしょうか?
正しいものを一つ選択してください
・Orchestratorでロボットをプロビジョニングする。
・Orchestrator URLとRobot keyを使用してローカルマシンでロボットを設定する。
・ロボットを動作させるローカルマシンとOrchestratorが同一のLANもしくはVPN上にあるか確認する。
正解
・Orchestratorでロボットをプロビジョニングする。
・Orchestrator URLとRobot keyを使用してローカルマシンでロボットを設定する。
ロボットとOrchestrator間の接続を確立する2ステップ
- ロボットの設定
- OrchestratorでロボットのProvisioning
問題:Orchestratorに接続されたロボットがリアルタイムで利用できるかどうかチェックすることは可能でしょうか?
正しいものを一つ選択してください
・はい、Heartbeatメカニズムを利用することで可能であり、各ロボットの状態はRobotsページに更新されています。
・Jobを実行しようとする時のみ可能です。
正解
・はい、Heartbeatメカニズムを利用することで可能であり、各ロボットの状態はRobotsページに更新されています。
すべてのロボットが次のいずれかのステータスとなります。
- [利用可 (Available)] – ロボットがプロセスを実行しておらず、自由に使用できる状態
- [ビジー (Busy)] – ロボットがプロセスを実行中である状態
- [応答なし (Unresponsive)] – Robot および Orchestrator が 2 分間にわたり通信していない状態(デフォルトシナリオ)。この値は
web.configファイルで設定することができます。 - 切断 – UiPath Robot サービスが実行されていない状態
問題:OrchestratorでCancelコマンドに関連しているStudioのアクティビティは次のうちどれでしょうか?
正しいものを一つ選択してください
・Should Stopアクティビティ
・Cancellation Scopeアクティビティ
・Press Terminateアクティビティ
・Is Overアクティビティ
正解
Cancelコマンドは、Should Stopアクティビティがなければ停止しません。
問題:Orchestratorでアクティブなパッケージバージョンが削除された場合何が起こるでしょうか?
正しいものを一つ選択してください
・特定のパッケージバージョンおよびそのバージョンを使用している全てのプロセスがOrchestratorから削除されます。
・特定のパッケージバージョンがOrchestratorから削除されます、そのバージョンを使用していたプロセスはすべて、自動的に使用可能な最新バージョンに切り替わります。
・そのプロセスを実行しようとするとエラーが発生します。
正解
・そのプロセスを実行しようとするとエラーが発生します。
OrchestratorではPublishされた自動化処理をバージョン管理しており、問題が発生した場合は過去のバージョンに戻すことが可能です。
問題:Orchestrator Dashboardに含まれるチャートを選択してください。
正しいものを一つ選択してください
・Environments
・Robots
・Job results
・Transactions
正解
・Robots
・Job results
・Transactions
ダッシュボードで表示できるチャート一覧
- プロセス
- アセット
- キュー
- スケジュール
- ロボット
- ジョブ
- トランザクション
問題:アサインされたロボットが異なるプロセスを実行する間に、新規のジョブがトリガされた場合何が起こるでしょうか?
正しいものを一つ選択してください
・ロボットがプロセスの実行を終了するまで新規のジョブのステータスが「Pending」のままになります。
・システムが「This robot is not available at the moment」というエラーメッセージを生成します。
・新規のジョブを開始する際に使用可能なロボット一覧のポップアップが表示されます。
正解
・ロボットがプロセスの実行を終了するまで新規のジョブのステータスが「Pending」のままになります。
Pending中もStop After(停止時間)は変わらずカウントし続けます。
問題:トランザクションとは何でしょうか?
正しいものを一つ選択してください
・キューに追加されるジョブ
・キューに追加されるプロセス
・キューに追加され、ロボットで処理された一連の引数
・プロセスの実行
正解
・キューに追加され、ロボットで処理された一連の引数
キューとは、無制限に項目を保持できる収納機能です。
サイズの大きなExcelファイルを読み込む場合に複数のロボットで分担する場合にキューを使用します。
問題:Scheduleの「stop after」オプションは何を参照するでしょうか?
正しいものを一つ選択してください
・特定のスケジュールが無効になるまでの時間。
・予定されたプロセスがキャンセル、終了するまでの時間。
・Stop Afterは存在しません。
正解
・予定されたプロセスがキャンセル、終了するまでの時間。
保留中も停止時間はカウントされます。停止時間を20秒に設定して15秒間保留していた場合、残り5秒で処理が終わらなかった場合は、停止されます。
問題:Orchestrator の機能は次のうちどれですか?
正しいものを一つ選択してください
・監視モードにてロボットが実行するワークフローを設計します
・監査モードにてロボットが実行するワークフローを設計します
・ローカルマシンで Windows プロセスを実行します
・複数のロボットをリモート制御し、ワークフローの実行を管理します
正解
・複数のロボットをリモート制御し、ワークフローの実行を管理します
ワークフローの設計はStudio。ワークフローの実行はRobot
複数のロボットを管理してワークフローの実行を管理するOrchestratorがあります。
問題:Orchestrator を使用し、ジョブを実行する方法をすべて選択してください
正しいものを一つ選択してください
・[ジョブ (Jobs)] ページからジョブを手動で実行します
・Orchestrator からジョブは実行できません
・[スケジュール (Schedules)] ページからスケジュールを作成して特定の時間にジョブを実行します
正解
・[ジョブ (Jobs)] ページからジョブを手動で実行します
・[スケジュール (Schedules)] ページからスケジュールを作成して特定の時間にジョブを実行します
Orchestratorから任意のタイミングで実行する手動実行と指定されたスケジュール通りに実行するスケジュール実行が存在します。
問題:スケジュールのプロセスをロボットグループのロボットに割り当てる方法をすべて選択してください
- スケジュールしたプロセスはロボットグループのロボットに割り当てることはできません
- プロセスをロボットグループのすべてのロボットに割り当てることができます
- プロセスを使用可能なロボットに動的に割り当てることができます
- プロセスはユーザーの選択によりロボットグループの特定のロボットに割り当てることができます
正解
- プロセスをロボットグループのすべてのロボットに割り当てることができます
- プロセスを使用可能なロボットに動的に割り当てることができます
- プロセスはユーザーの選択によりロボットグループの特定のロボットに割り当てることができます
問題:実行中のプロセスを終了する方法をすべて選択してください
- [終了 (End)]
- [強制終了 (Kill)]
- [完了 (Finish)]
- [停止 (Stop)]
- [強制終了 (Kill)]
- [停止 (Stop)]
問題:実行中のジョブを即座に終了する方法は次のうちどれですか?
- [停止 (Stop)]
- [完了 (Finish)]
- [終了 (End)]
- [強制終了 (Kill)]
正解
- [強制終了 (Kill)]
問題:実行中のジョブを正常に停止する方法は次のうちどれですか?
- [停止 (Stop)]
- [完了 (Finish)]
- [強制終了 (Kill)]
- [終了 (End)]
正解
- [停止 (Stop)]
問題:「ABC」ロボットグループには 3 台のロボットが割り当てられています。3 台のロボットに 1 つのパッケージを割り当てる方法は次のうちどれですか?
- パッケージを選択して各ロボットのジョブを個別に実行します
- ロボットグループのすべてのロボットに同じパッケージを実行させることはできません
- [プロセス (Processes)] ページにてパッケージをロボットグループにデプロイします。次に [ジョブ (Jobs)] ページに移動し、対象のプロセスを選択して [開始 (START)] をクリックします
- 3 台のロボットとパッケージを同じロボットグループに追加します
正解
- [プロセス (Processes)] ページにてパッケージをロボットグループにデプロイします。次に [ジョブ (Jobs)] ページに移動し、対象のプロセスを選択して [開始 (START)] をクリックします
問題:プロセスのデプロイに必要な項目をすべて選択してください
- [パッケージ名 (Package Name)]
コメント:正解
- [パッケージのバージョン (Package Version)]
コメント:正解
- [タイプ (Type)]
- [ロボットグループ (Environment)]
コメント:正解
問題:Orchestrator の [ダッシュボード (Dashboard)] ではコンポーネントの使用状況が表示されます。表示されるコンポーネントのチャートをすべて選択してください
- [ロボットグループ (Environments)]
- [トランザクション (Transactions)]
コメント:正解
- [ロボット (Robots)]
コメント:正解
- [ジョブ (Jobs)]
コメント:正解
問題:ロボットキーの生成方法は次のうちどれですか?
- ロボットキーは各ロボットによって自動的に生成され、ロボットトレイに保存されます
- [マシン (Machine)] ページにてマシンをプロビジョンすることでロボットキーを生成します
コメント:正解
- ロボットキーにはライセンスが付属しています
- ロボットキーは UiPath Studio によって生成されます
問題:Orchestrator に接続されているロボットが利用可能かどうかをリアルタイムで確認できますか?
- はい、ジョブの実行時に確認できます
- はい、 [ロボット (Robots)] ページの [ステータス (STATUS)] にて各ロボットの状態が確認できます
コメント:正解
問題:[パッケージ (Packages)] ページの機能をすべて選択してください
- 新しいパッケージを手動で追加できます
コメント:正解
- パッケージを任意のプロセスにリンクできます
- パブリッシュされたすべてのパッケージが表示されます
コメント:正解
- パッケージのバージョンを削除できます
コメント:正解
問題:Orchestrator のアクティブなパッケージバージョンが削除された場合はどうなりますか?
- アクティブなパッケージは削除できません
コメント:正解
- 特定のパッケージバージョンを Orchestrator から削除することで、すべてのプロセスは自動的に利用可能な最新のパッケージバージョンに更新されます
- 特定のパッケージバージョンとそれを使用しているすべてのプロセスが Orchestrator から削除されます
問題:ジョブがスケジュールまたは手動で開始されたかを確認する方法は次のうちどれですか?
- [ジョブ (Jobs)] ページの [実行元 (Source)] にて確認できます
コメント:正解
- ジョブの [詳細 (Details)] にて確認できます
- ジョブの実行元は確認できません
問題:ロボットがプロセスを実行中に新しいジョブが起動した場合、ロボットの状態はどうなりますか?
- ロボットがプロセスの実行を終了するまで、新しいジョブは [保留中 (Pending)] の状態となり、ロボットが利用可能になると新しいジョブが実行されます
コメント:正解
- 新しいジョブを開始するために利用可能なロボットのリストがポップアップで表示されます
- 「このロボットは現在利用できません」というエラーメッセージが表示されます
問題:UiPath Studio にて [ログフィールドを追加 (Add Log Fields)] を使用する必要があるのは次のうちどれですか?
- 最大 5 つのフィールドをログメッセージに生成する必要がある場合に使用します
- ログを有効にする必要がある場合に使用します
- 標準のログメッセージに新しいフィールドを追加してカスタマイズする必要がある場合に使用します
コメント:正解
問題:アセットの種類をすべて選択してください
- [Decimal]
- [Credential]
コメント:正解
- [String]
コメント:正解
- [Integer]
コメント:正解
- [Boolean]
コメント:正解
問題:Orchestrator の [キュー (Queues)] の機能は次のうちどれですか?
- 複数のロボットによって処理されるデータを保存します
コメント:正解
- 複数のロボットによって実行されるプロセスのリストを保存します
- 複数のロボットによって実行されるジョブのリストを保存します
- 特定の順序で処理するロボットによってスケジュールされたジョブのリストを保存します
問題:トランザクションの概要は次のうちどれですか?
- キューに追加されたロボットの処理のことです
コメント:正解
- キューに追加したプロセスのことです
- プロセスの実行のことです
- キューに追加したジョブのことです
問題:キュー内のトランザクションを、アプリケーションの例外による失敗後に再処理することはできますか?
- ビジネス例外のために失敗したトランザクションのみを再処理できます。
- いいえ、トランザクションは、失敗した場合再処理できません。
- はい、[トランザクション (Transactions)] ページで手動で再試行できます。
コメント:正解
- はい、キューの [自動再試行 (Auto-Retry)] プロパティが有効になっている場合、再処理できます。
コメント:正解
問題:アプリケーション例外により、失敗したトランザクションに対して、実行できるその他のアクションをすべて選択してください
- [レビュー中 (In Review)]
コメント:正解
- [検証済み (Mark as Verified)]
コメント:正解
- [リトライ (Retry Items)]
コメント:正解
- 失敗したトランザクションのステータスを手動で設定することはできません
問題:ロボットは、[Info] レベルの [ログメッセージ (Log Message)] アクティビティを使用するワークフローを実行しています。ロボットのログレベルが [Error] に設定されている場合、[Info] ログは Orchestrator の [ロボット (Robots)] ページ、[ジョブ (Jobs)] ページの [ログ (Logs)] ページに表示されますか?
- いいえ、[ロボット (Robots)] ページの [ログを表示 (View Logs)] には [Error] のログレベルから表示されます
コメント:正解
- はい、すべてのログメッセージはログレベルに関係なく、[ロボット (Robots)] ページの [ログを表示 (View Logs)] に表示されます
問題:Orchestrator の [停止 (Stop)] 機能によって、Studio 側で実行されるアクティビティは次のうちどれですか?
- [停止すべきか確認 (Should Stop)]
コメント:正解
- [終了を押す (Press Terminate)]
- [終了 (Is Over)]
- [キャンセルスコープ (Cancellation Scope)]
問題:キューアイテムのステータスが [進行中 (In Progress)] のまま 24 時間、更新されない場合はどうなりますか?
- ステータスは [破棄済み (Abandoned)] に変更されます
コメント:正解
- 自動的に [キュー (Queues)] から削除されます
- 優先度が 1 段階上がります
- ロボットが処理するまでトランザクションは [キュー (Queues)] に残ります
問題:[ジョブ (Jobs)] ページで使用できるフィルタをすべて選択してください
- [インターバル (Interval)]
コメント:正解
- [ロボット (Robot)]
- [状態 (State)]
コメント:正解
- [実行元 (Source)]
コメント:正解
問題:Attended Robots で実行したジョブの確認方法は次のうちどれですか?
- [ジョブ (Jobs)] ページの [ロボット (Robot)] フィルタから [Attended] を選択します
- [ジョブ (Jobs)] ページの [ロボット (Robot)] フィルタから [Unattended] を選択します
- [ジョブ (Jobs)] ページの [実行元 (Source)] フィルタから [エージェント (Agent)] を選択します
コメント:正解
問題:失敗したトランザクションにレビュー担当者を設定できますか?
- はい
コメント:正解
- いいえ
問題:レビュー用に割り当てられたアイテムを管理する最も簡単な方法は次のうちどれですか?
- 失敗したトランザクションアイテムにレビュー担当者を割り当てることはできません
- [トランザクション (Transactions)] ページに移動し、特定の [キュー (Queues)] をそれぞれ変更します
- [キュー (Queues)] ページの [レビュー要求 (Review Requests)] タブを使用します
コメント:正解
問題:[レビュー要求 (Review Requests)] ページにて使用できるフィルタをすべて選択してください
- [リビジョン (Revision)]
コメント:正解
- [ステータス (Status)]
コメント:正解
- [優先 (Priority)]
コメント:正解
- [キュー (Queue)]
コメント:正解
問題:Orchestrator からメインワークフローのパラメーターを設定できますか?
- いいえ
- はい
コメント:正解
問題:Orchestrator にてパラメーターを設定する方法をすべて選択してください
- [ロボット (Robots)] ページ -> [編集 (Edit)] -> [設定 (Settings)] タブ -> [パラメーター (Parameters)]
- [ロボットグループ (Environments)] ページ -> [編集 (Edit)] -> [パラメーター (Parameters)]
- [プロセス (Processes)] ページ -> [プロセスの表示 (View Process)] -> [パラメーター (PARAMETERS)] タブ
コメント:正解
- [ジョブ (Jobs)] ページ -> [ジョブを開始 (Start Job)] -> [パラメーター (Parameters)] タブ
コメント:正解
問題:Orchestrator のパラメーターはプロセスのメインファイルにあるパラメータを上書きできますか?
- いいえ
- はい
コメント:正解
問題:パラメーター変更の優先順位は次のうちどれですか?
- [プロセス (Processes)] -> UiPath Studio -> [ジョブ (Jobs)]
- パラメーターの変更に対する優先順位は特にありません
- UiPath Studio -> [ジョブ (Jobs)] -> [プロセス (Processes)]
- [ジョブ (Jobs)] -> [プロセス (Processes)] -> UiPath Studio
コメント:正解
- [プロセス (Processes)] -> [ジョブ (Jobs)] -> UiPath Studio
問題:マシンテンプレートを新規作成するときの必須項目は次のうちどれですか?
- [テンプレート名 (Template Name)]
コメント:正解
- [ロボットグループ (Environment)]
- [名前 (Name)]
- [タイプ (Type)]
問題:アセットから情報を取得するアクティビティをすべて選択してください
- [アセットを取得 (Get Asset)]
コメント:正解
- [資格情報を取得 (Get Credential)]
コメント:正解
- [トランザクションアイテムを取得 (Get Transaction Item)]
- [テキストを取得 (Get Text)]
問題:ロボットがアクセスできるアセット種類をすべて選択してください
- [マシンごとの値 (Per Machine Value)]
- [共通の値 (Single Value)]
コメント:正解
- [ロボットごとの値 (Value Per Robot)]
コメント:正解
- [ロボットグループごとの値 (Environment Value)]
間違えたもの
間違えたものです。参考に載せておきます。
問題:マシンテンプレートの名前を変更できますか?
- はい、編集権限に関係なく変更できます
- はい、ロボットに対する編集権限がある場合に変更できます
- はい、マシンに対する編集権限がある場合に変更できます
- いいえ、変更できません
コメント:不正解
問題:標準ロボットをフローティングロボットに変換できますか?
- はい、Unattended 標準ロボットのみ変換できます
コメント:不正解
- いいえ、変換できません
- はい、Attended 標準ロボットのみ変換できます
- はい、変換できます
問題:マシンテンプレートが適用されるのは次のうちどれですか?
- Active Directory ユーザーと Attended フローティングロボット
- Active Directory ユーザーと Unattended フローティングロボット
- Orchestrator ユーザーと Attended フローティングロボット
- Orchestrator ユーザーと Unattended フローティングロボット
コメント:不正解
問題:プロセスのパッケージバージョンを最新に更新する方法は次のうちどれですか?
- パッケージをデプロイしたタイミングで最新のパッケージバージョンが自動的に更新されます
コメント:?
- [プロセス (Processes)] ページから [プロセスの表示 (View Process)] をクリックして目的のオプションを選択します
- 唯一の方法は目的のパッケージバージョンで新しいプロセスをデプロイすることです
問題:[スケジュール (Schedule)] アクションの [指定時間が経過した後にジョブを停止 (Stop Job after)] 機能は次のうちどれですか?
- 特定のスケジュールが期限切れになるまでの期間を表す
コメント:不正解
- [指定時間が経過した後にジョブを停止 (Stop Job after)] の機能はありません
- 指定した日時にスケジュールを停止することができます
問題:ロボットトレイでプロセスが利用可能になるのは次のうちどれですか?
- Orchestrator でデプロイしたすべてのプロセスはロボットトレイで利用可能です
コメント:不正解
- ロボットグループのロボットにパッケージがデプロイされている場合に利用可能です
- ローカルマシンから発行されたすべてのプロセスはロボットトレイで利用可能です
- ロボットにてジョブが作成されると利用可能です
問題:Orchestrator にパッケージをアップロードする方法は UiPath Studio にて [パブリッシュ (Publish)] を実行する方法のみですか?
- いいえ、パッケージは Orchestrator の [パッケージ (Packages)] ページからもパプリッシュできます
- はい、パッケージは UiPath Studio のみパブリッシュできます。
コメント:不正解
問題:Orchestrator とロボットを接続するために必要な手順をすべて選択してください
- Orchestrator でロボットをプロビジョンします
- ロボットが動作しているローカルマシンと Orchestrator が同じ LAN または VPN 上に存在するかを確認します
コメント:不正解
- Orchestrator の URL とロボットキーを使用し、ローカルマシンのロボットと接続します
コメント:正解
問題:異なる 3 台のロボットに対するプロセスのデプロイ方法をすべて選択してください?
- ジョブを作成し、3 台のロボットをすべて割り当てます
- スケジュールを作成し、[実行ターゲット (Execution Target)] タブにて 3 台のロボットを割り当てます
コメント:正解
- 自動的にプロセスを実行するロボットのロボットグループにプロセスをデプロイします
コメント:不正解
- 異なる 3 台のロボットに 1 つのプロセスを割り当てることはできません
問題:新しいロボットグループを作成するときに設定が必要な項目は次のうちどれですか?
- [名前 (Name)]
- [説明 (Description)]
- [ロボット (Robots)]
コメント:不正解
- [タイプ (Type)]
 RPA、UiPathについて動画形式で学べるコアワカのUdemy講座を
RPA、UiPathについて動画形式で学べるコアワカのUdemy講座を
いつでもお得な価格で受講できるクーポンを発行しています。
研修にも使用できる書籍もこちらから購入が可能です。
動画を受講したい場合はボタンをクリックしてください。
クーポンコードが適用されたUdemyコースのリンク一覧ページに移動します。